拓展模块使用说明¶
红外深度传感器¶
1.介绍:
红外深度传感器的设计是基于 TOF(Time of Flight)即飞行时间原理。即传感器发出经调制的近红外光,遇物体后反射,传感器通过计算光线发射和反射时间差或相位差,来计算距离物体的距离。
2.产品特性
红外深度传感器的探测面积见下图,
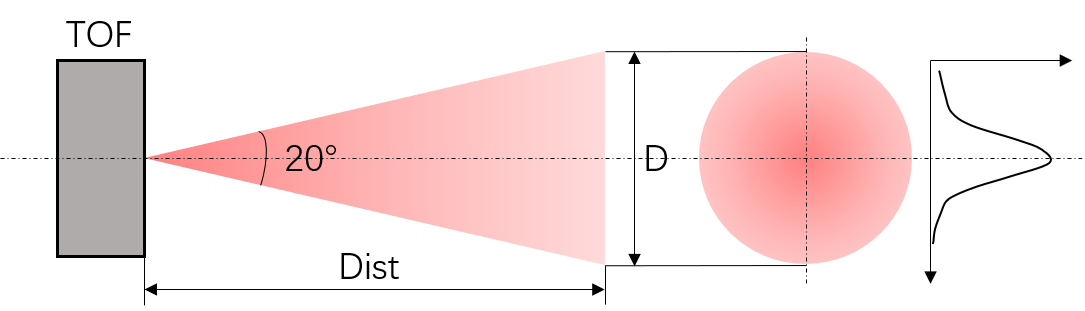
其发出的是一个角度为 20° 的圆锥光,这个光斑 D 与距离 Dist 的关系:
D=2×Dist×tan(10)
要实现最佳测试效果,应保证目标物的尺寸要至少等于 TOF 光斑的尺寸。
小技巧
如果目标物小于光斑大小,那么应保证目标物尽量在光斑的中心位置,因为光斑内的光强分布并不是均匀的,而是呈一个类高斯分布,中间光强大,四周光强小,为了保证返回光能量足够,应尽量保证目标物在光斑中心。
3.引脚说明
| 编号 | 引脚 | 功能 | 对应连接项 |
|---|---|---|---|
| 1 | VCC | 供电 | 电源正极 |
| 2 | GND | 供电 | 电源地 |
| 3 | TX | 发送 | RX |
| 4 | RX | 接收 | TX |
4.通讯协议和数据格式
| 通讯接口 | 波特率 | 数据位 | 停止位 | 奇偶校验 |
|---|---|---|---|---|
| UART | 115200 | 8 | 1 | none |
控制命令输入:
-
ir_distance_sensor_measure_on¶ 描述: 打开红外深度传感器数据输出
-
ir_distance_sensor_measure_off¶ 描述: 关闭红外深度传感器数据输出
数据输出:
-
ir distance:xxx 描述: 红外深度传感器数据格式
小技巧
命令格式都以字符串形式输入和输出
舵机¶
1.介绍
舵机的油门控制方式除了支持 485 控制,还可以进行 PWM 控制,控制模式包含:速度模式和角度模式。
注解
舵机的控制模式
舵机的控制模式需要通过官方的编程接口( Scratch / Python )进行切换,并且会记录在舵机内部,不会随着舵机掉电而重置。使用 PWM 控制前请确认舵机当前的控制模式。
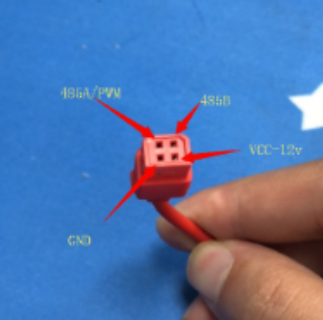
2.引脚说明
舵机上的 485 管脚和 PWM 管脚复用,如下图所示
3.控制说明
在 PWM 控制方式下,舵机对应的输入输出
| 控制模式 | 脉冲周期 | 油门范围 | 舵机输出 |
|---|---|---|---|
| 角度模式 | 50Hz | 2.5%~12.5% | 0°~360° |
| 速度模式 | 50hz | 2.5%~7.5% | 49rpm~0rpm,顺时针 |
| 7.5%~12.5% | 0rpm~—49rpm,逆时针 |