3. 红外深度传感器¶
3.1. 介绍¶
红外深度传感器的设计是基于 TOF(Time of Flight)即飞行时间原理。即传感器发出经调制的近红外光,遇物体后反射,传感器通过计算光线发射和反射时间差或相位差,来计算距离物体的距离。
3.2. 产品特性¶
红外深度传感器的探测面积见下图,
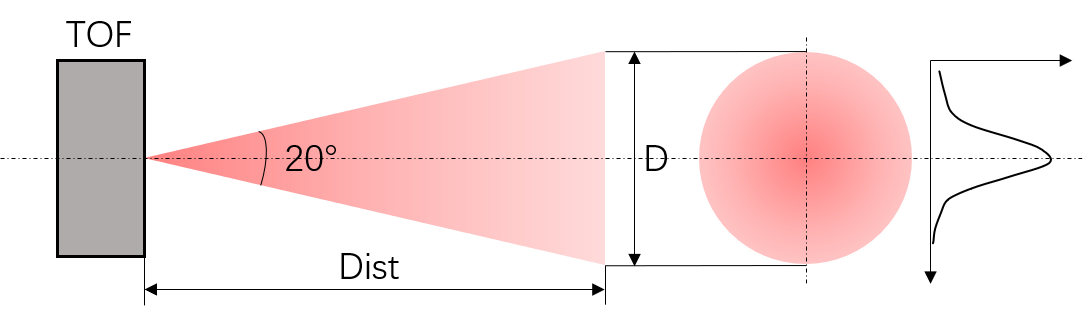
其发出的是一个角度为 20° 的圆锥光,这个光斑 D 与距离 Dist 的关系:
D=2×Dist×tan(10)
要实现最佳测试效果,应保证目标物的尺寸要至少等于 TOF 光斑的尺寸。
小技巧
如果目标物小于光斑大小,那么应保证目标物尽量在光斑的中心位置,因为光斑内的光强分布并不是均匀的,而是呈一个类高斯分布,中间光强大,四周光强小,为了保证返回光能量足够,应尽量保证目标物在光斑中心。
