5. UART 接口¶
5.1. 介绍¶
UART 是第三方平台跟 EP 连接的一种方式。用户通过 UART 可以很方便的将搭载在 EP 上的单片机跟 EP 建立连接,并在单片机上实现交互逻辑,使用明文 SDK 和 EP 机器人进行通信,实现对 EP 自动化的控制。
5.3. 串口配置¶
| 通讯接口 | 波特率 | 数据位 | 停止位 | 奇偶校验 |
|---|---|---|---|---|
| UART | 115200 | 8 | 1 | none |
5.5. Python 编程示例¶
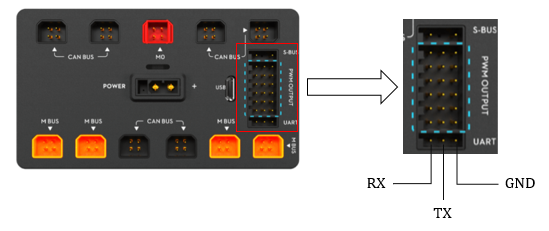
PC 通过串口转 USB 连接到 EP 运动控制器的 UART 上。
PC 端开启串口调试助手,选择打开串口对应 COM 口。
打开已跟 EP 建立连接设备的官方 App,进入 Python 编程模式。
在 Python 编程界面下,写一个简单的程序,使用 read_string() 读取串口数据,打印出来后再通过 write_string() 进行转发,并点击 “开始” 按钮运行程序。
在串口调试助手上发送一个字符串,看是否能正确收到发出去的字符串。并查看 App 上是否正确打印了收到的字符串。
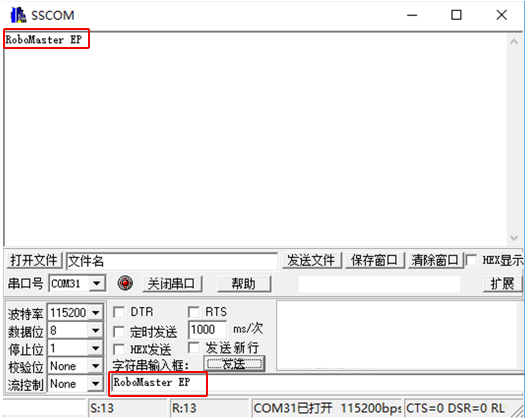
串口调试助手发送并回显字符串
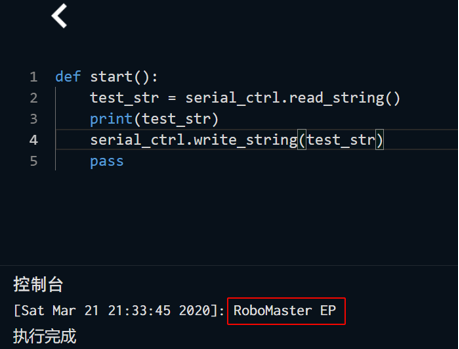
App 打印收到的字符串并进行转发
5.6. 明文 SDK 示例¶
PC 通过串口转 USB 连接到 EP 运动控制器的 UART 上。
PC 端开启串口调试助手,选择打开串口对应 COM 口。
在串口调试助手上发送字符串
command;,若能收到 EP 发回来的ok表示明文 SDK 解析成功。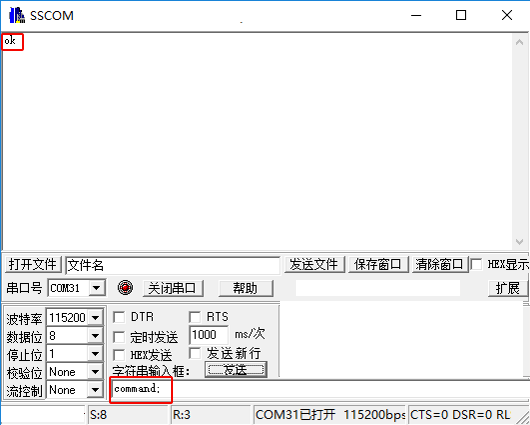
串口调试助手发送 SDK 字符串收到回应
警告
在通过 UART 发送明文 SDK 指令时,一定要记得在命令后面加 ; 分号,不然会解析失败。