2. 接入方式¶
2.1. 連接方式¶
機器人支持多種連接方式,可通過任意一種連接方式接入使用 SDK 功能
直接連接 :
- Wi-Fi 直連 :通過將機器人設置為直連模式,並連接機器人的 Wi-Fi 熱點進行接入
- USB 連接 :通過機器人的智能中控上的 USB 端口接入(需支持 RNDIS 功能)
- UART 連接 :通過機器人的運動控制器上的 UART 接口接入
組網連接 :
Wi-Fi 組網 :通過將機器人設置為組網模式,並將計算設備與機器人加入到同一個局域網內,實現組網連接
2.2. 連接參數¶
Wi-Fi 直連/Wi-Fi 組網/USB 連接方式請參考以下參數配置:
IP 地址說明:
- Wi-Fi 直連模式下,機器人默認 IP 為 192.168.2.1
- Wi-Fi 組網模式下,機器人 IP 由路由器動態分配,可通過監聽 IP 廣播 數據端口來獲取當前局域網內機器人 IP 地址來進行連接
- USB 連接模式下,需要計算設備支持 RNDIS 功能,機器人默認 IP 為 192.168.42.2
端口及連接方式說明:
| 數據 | 端口號 | 連接方式 | 說明 |
|---|---|---|---|
| 視頻流 | 40921 | TCP | 需執行開啟視頻流推送命令,才有數據輸出 |
| 音頻流 | 40922 | TCP | 需執行開啟音頻流推送命令,才有數據輸出 |
| 控制命令 | 40923 | TCP | 可通過當前通道使能 SDK 模式,參見 SDK 模式控制 |
| 消息推送 | 40924 | UDP | 需執行開啟消息推送命令,才有數據輸出 |
| 事件上報 | 40925 | TCP | 需執行開啟事件上報命令,才有數據輸出 |
| IP 廣播 | 40926 | UDP | 當機器人未與任何設備建立連接時,會有數據輸出 |
- UART 連接方式請參考以下 UART 參數配置
| 波特率 | 數據位 | 停止位 | 校驗位 |
|---|---|---|---|
| 115200 | 8 | 1 | None |
警告
UART 連接方式下的數據說明:
UART 連接方式下,僅提供 控制命令/消息推送/事件上報 數據,如需 視頻流/音頻流 數據,請使用 Wi-Fi/USB 連接模式
2.3. 連接示例¶
下面我們將以 Python 編程語言為基礎,介紹多種連接方式的使用範例。以下所有示例中,默認 PC 上需要集成 Python 3.x 環境(安裝方式請參考 Python Getting Started),後面不再贅述。
2.3.1. WIFI 直連模式¶
- 環境準備
- 準備一台 PC 電腦,需具備 Wi-Fi 功能。
- 建立連接
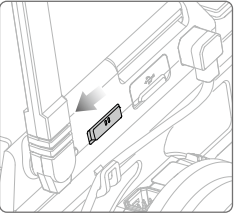
開啟電源
開啟機器人電源,切換智能中控的連接模式開關至 直連模式,如下圖所示:
建立 Wi-Fi 連接
打開電腦的無線網絡訪問列表,選擇位於機身貼紙上對應的 Wi-Fi 名稱,輸入 8 位密碼,選擇連接
準備連接腳本
建立 Wi-Fi 連接後,我們還需要編程與機器人建立 TPC/IP 連接 機器人開放多個連接端口可供連接,我們首先應完成 控制命令端口 的連接(直連模式下機器人 IP 地址為
192.168.2.1, 控制命令端口號:40923),以使能機器人 SDK 模式。這裡我們以 Python 編程語言為例,編寫腳本來完成 建立控制連接,使能 SDK 模式 功能
參考代碼如下
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55
# -*- encoding: utf-8 -*- # 測試環境: Python 3.6 版本 import socket import sys # 直連模式下,機器人默認 IP 地址為 192.168.2.1, 控制命令端口號為 40923 host = "192.168.2.1" port = 40923 def main(): address = (host, int(port)) # 與機器人控制命令端口建立 TCP 連接 s = socket.socket(socket.AF_INET, socket.SOCK_STREAM) print("Connecting...") s.connect(address) print("Connected!") while True: # 等待用戶輸入控制指令 msg = input(">>> please input SDK cmd: ") # 當用戶輸入 Q 或 q 時,退出當前程序 if msg.upper() == 'Q': break # 添加結束符 msg += ';' # 發送控制命令給機器人 s.send(msg.encode('utf-8')) try: # 等待機器人返回執行結果 buf = s.recv(1024) print(buf.decode('utf-8')) except socket.error as e: print("Error receiving :", e) sys.exit(1) if not len(buf): break # 關閉端口連接 s.shutdown(socket.SHUT_WR) s.close() if __name__ == '__main__': main()
將上述代碼保存為 rm_direct_connection_sdk.py
運行腳本
Windows 系統 在安裝完成 Python 環境後可直接雙擊*.py 文件運行,若無法運行,請按
win+r並輸入cmd,按回車後打開命令運行, 鍵入python rm_direct_connection_sdk.py運行;Linux 系統 請按
ctrl+alt+t打開命令行鍵入python rm_direct_connection_sdk.py運行建立 TCP/IP 控制連接
當運行窗口輸出
Connecting...時,代表正在嘗試與機器人建立連接,當運行窗口輸出Connected!;時,表示已經成功建立控制連接。
- 驗證
在成功建立控制連接後,在命令行裡輸入 command, 機器人返回 ok;,則表示已經完成連接,並且機器人進入 SDK 模式成功,之後您就可以輸入任意控制指令控制機器人了。
- 其他
UART物理鏈路連接示例請參考:UART
2.3.2. WIFI 路由器模式¶
- 環境準備
- 準備一台 PC 電腦,具備網絡功能(Wi-Fi 或者有線網絡皆可)
- 準備一台家用路由器
- 建立連接
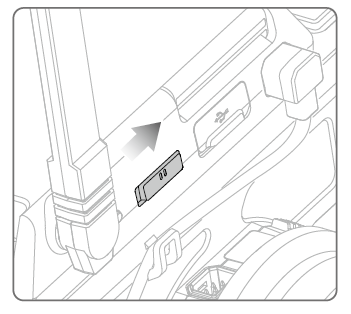
開啟電源
開啟機器人電源,切換智能中控的連接模式開關至 組網模式
建立組網連接
Wi-Fi:
若使用 Wi-Fi 連接,請將 PC 電腦通過 Wi-Fi 連接至路由器上
有線網絡:
若使用有線網絡連接,請將 PC 電腦通過網線連接至路由器的 LAN 口
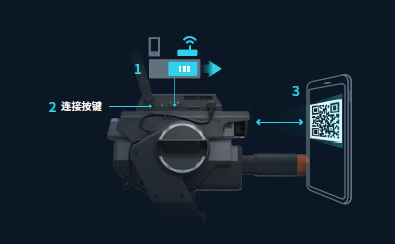
確保 PC 已經接入路由器後,打開 RoboMaster App,進入組網連接頁面,按下機器人智能中控上的掃碼連接按鍵,掃瞄二維碼進行組網連接,直到連接成功。
獲取機器人在局域網內的 IP 地址
在完成組網連接後,我們的 PC 機已經和機器人處於同一個局域網內,接下來需要編程與機器人建立 TPC/IP 連接,並連接到 控制命令端口 端口,以使能機器人 SDK 模式。
若您使用的路由器開啟了 DHCP 服務,則機器人的 IP 地址為路由器動態分配,我們需要進一步獲取機器人在局域網內的 IP 地址。這裡提供兩種辦法獲取:
- 若您通過 RoboMaster App 進行的組網連接,則進入 RoboMaster App的 設置->連接 頁面,機器人在局域網內的 IP 地址會在此處顯示。
- 若您通過其他方式進行的組網連接,則需要通過 監聽機器人地址廣播 來獲取機器人在局域網內的 IP 地址,更多細節請參考 廣播 部分。
參考代碼如下
1 2 3 4 5 6 7 8 9 10 11 12 13
# -*- encoding: utf-8 -*- import socket ip_sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM) # 綁定 IP 廣播端口 ip_sock.bind(('0.0.0.0', 40926)) # 等待接收數據 ip_str = ip_sock.recvfrom(1024) # 輸出數據 print(ip_str)
將上述代碼保存為 rm_get_robot_ip.py, 運行上述代碼,命令行輸出:
robot ip 192.168.0.115
我們可以看到,通過 監聽機器人地址廣播 可以獲取到機器人在局域網內的 IP 地址為
192.168.0.115
準備連接腳本
我們已經獲取到機器人的 IP 地址,這裡我們仍以 Python 編程語言為例,編寫腳本來完成 建立控制連接,使能 SDK 模式 功能
參考代碼如下
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56
# -*- encoding: utf-8 -*- # 測試環境:Python 3.6 版本 import socket import sys # 組網模式下,機器人當前 IP 地址為 192.168.0.115, 控制命令端口號為 40923 # 機器人 IP 地址根據實際 IP 進行修改 host = "192.168.0.115" port = 40923 def main(): address = (host, int(port)) # 與機器人控制命令端口建立 TCP 連接 s = socket.socket(socket.AF_INET, socket.SOCK_STREAM) print("Connecting...") s.connect(address) print("Connected!") while True: # 等待用戶輸入控制指令 msg = input(">>> please input SDK cmd: ") # 當用戶輸入 Q 或 q 時,退出當前程序 if msg.upper() == 'Q': break # 添加結束符 msg += ';' # 發送控制命令給機器人 s.send(msg.encode('utf-8')) try: # 等待機器人返回執行結果 buf = s.recv(1024) print(buf.decode('utf-8')) except socket.error as e: print("Error receiving :", e) sys.exit(1) if not len(buf): break # 關閉端口連接 s.shutdown(socket.SHUT_WR) s.close() if __name__ == '__main__': main()
將上述代碼保存為 rm_networking_connection_sdk.py
運行腳本
Windows 系統:在安裝完成 Python 環境後可直接雙擊*.py 文件運行,若無法運行,請按
win+r並輸入cmd,按回車後打開命令運行, 鍵入python rm_networking_connection_sdk.py運行;Linux 系統 請按:
ctrl+alt+t打開命令行鍵入python rm_networking_connection_sdk.py運行建立 TCP/IP 控制連接
當運行窗口輸出
Connecting...時,代表正在嘗試與機器人建立連接,當運行窗口輸出Connected!;時,表示已經成功建立控制連接。
- 驗證
在成功建立控制連接後,在命令行裡輸入 command, 機器人返回 ok;,則表示已經完成連接,並且機器人進入 SDK 模式成功,之後你就可以輸入任意控制指令進行機器人控制了。
2.3.3. USB 連接¶
USB 連接模式,實質上是使用 RNDIS 協議,將機器人上的 USB 設備虛擬為一張網卡設備,通過 USB 發起 TCP/IP 連接。更多 RNDIS 內容請參見 RNDIS Wikipedia。
- 環境準備
- 準備一台具備 RNDIS 功能的 PC 電腦(請確認 PC 電腦上已經配置好 RNDIS 功能)
- 準備一根 Micro-USB 數據線
- 建立連接
開啟電源
開啟機器人電源,無需關心連接模式開關位置
建立 USB 連接
將 USB 數據線接入到機器人智能中控上的 USB 口,另一端與電腦相連
測試連接
打開命令行窗口,運行:
ping 192.168.42.2
若命令行輸出通信成功,則表示鏈路正常,可以進行下一步,如:
PING 192.168.42.2 (192.168.42.2) 56(84) bytes of data. 64 bytes from 192.168.42.2: icmp_seq=1 ttl=64 time=0.618 ms 64 bytes from 192.168.42.2: icmp_seq=2 ttl=64 time=1.21 ms 64 bytes from 192.168.42.2: icmp_seq=3 ttl=64 time=1.09 ms 64 bytes from 192.168.42.2: icmp_seq=4 ttl=64 time=0.348 ms 64 bytes from 192.168.42.2: icmp_seq=5 ttl=64 time=0.342 ms --- 192.168.42.2 ping statistics --- 5 packets transmitted, 5 received, 0% packet loss, time 4037ms rtt min/avg/max/mdev = 0.342/0.723/1.216/0.368 ms
若命令行輸出 無法訪問… 或者顯示超時,則需要檢查 PC 上 RNDIS 服務是否配置正常,並重啟小車重試,如:
PING 192.168.42.2 (192.168.42.2) 56(84) bytes of data. --- 192.168.42.2 ping statistics ---
4 packets transmitted, 0 received, 100% packet loss, time 3071ms
準備連接
連接過程與 WIFI 直連模式 -> 準備連接腳本 類似,需要將機器人 IP 地址替換為 USB 模式下的 IP 地址,其餘代碼與步驟保持不變即可,這裡不再贅述。
參考代碼變更如下
1 2 3 4 5 6 7 8 9 10 11
# -*- encoding: utf-8 -*- # 測試環境: Python 3.6 版本 import socket import sys # USB 模式下,機器人默認 IP 地址為 192.168.42.2, 控制命令端口號為 40923 host = "192.168.42.2" port = 40923 # other code
- 驗證
在成功建立控制連接後,在命令行裡輸入 command, 機器人返回 ok;,則表示已經完成連接,並且機器人進入 SDK 模式成功,之後你就可以輸入任意控制指令進行機器人控制了。
2.3.4. UART 連接¶
- 環境準備
- 一台 PC 電腦,並確定已安裝 USB 轉串口模塊驅動
- USB 轉串口模塊
- 三根杜邦線
- 建立連接
開啟電源
開啟機器人電源,無需關心連接模式開關位置
連接 UART
將杜邦線插在機器人底盤主控上的 UART 接口上,分別插在 GND, RX, TX 引腳上,另一端對應插在 USB 轉串口模塊的 GND, TX, RX 引腳
配置 UART,建立通信連接
這裡,我們仍以 Python 編程為例,進行 Windows 系統下 UART 相關配置。
確認 PC 已識別 USB 轉串口模塊,並在 電腦設備管理器 中的 端口 裡確認對應的串口號,如 COM3。
安裝 serial 模塊:
pip install pyserial
編寫代碼進行 UART 控制,參考代碼如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37
# -*- encoding: utf-8 -*- # 測試環境:Python 3.6 版本 import serial ser = serial.Serial() # 配置串口 波特率 115200,數據位 8 位,1 個停止位,無校驗位,超時時間 0.2 秒 ser.port = 'COM3' ser.baudrate = 115200 ser.bytesize = serial.EIGHTBITS ser.stopbits = serial.STOPBITS_ONE ser.parity = serial.PARITY_NONE ser.timeout = 0.2 # 打開串口 ser.open() while True: # 等待用戶輸入控制指令 msg = input(">>> please input SDK cmd: ") # 當用戶輸入 Q 或 q 時,退出當前程序 if msg.upper() == 'Q': break # 添加結束符 msg += ';' ser.write(msg.encode('utf-8')) recv = ser.readall() print(recv.decode('utf-8')) # 關閉串口 ser.close()
- 將上述程序保存為 rm_uart.py, 並運行
- 驗證
在成功建立控制連接後,在命令行裡輸入 command;, 機器人返回 ok;,則表示已經完成連接,並且機器人進入 SDK 模式成功,之後您就可以輸入任意控制指令進行機器人控制了。