1. 明文 SDK 介紹¶
RoboMaster EP 最重要的一個功能是支持明文 SDK,包含各個內置模塊和拓展模塊的控制接口,以及視頻流、音頻流的輸出接口。 EP 支持 USB、 WIFI、 UART 等多種接入方式,用戶可根據平台接口選擇任意方式接入。
明文 SDK 極大的豐富了 EP 的擴展性,使其能夠方便地與 第三方平台通信,提供了二次開發的可能性。下面將使用 Wi-Fi 直接連接 方式(其他連接模式請參考 建立連接),以完成 控制發射器發射 功能為例,介紹SDK中明文協議的使用。
1.1. 開發前的準備¶
- 準備一台 PC 電腦,需具備 Wi-Fi 功能
- PC 上搭建 Python 3.x 環境,安裝方式請參考 Python Getting Started
1.2. 建立連接¶
開啟電源
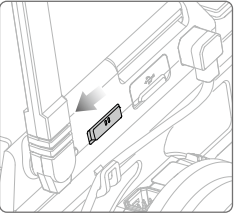
開啟機器人電源,切換智能中控的連接模式開關至 直連模式,如下圖所示:
建立Wi-Fi連接
打開電腦的無線網絡訪問列表,選擇位於機身貼紙上對應的 Wi-Fi 名稱,輸入 8 位密碼,選擇連接
準備連接腳本
在完成 Wi-Fi 後,我們還需要編程與機器人建立 TPC/IP 連接,並在對應的端口上傳輸特定的 明文協議,就可以實現相應的控制,更多 明文協議 請參考 協議內容。
這裡我們以 Python 編程語言為例,編寫腳本來完成 建立控制連接,接收用戶指令,傳輸明文協議 的過程,達到控制機器人的目的。
參考代碼如下
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 | # -*- encoding: utf-8 -*-
# 測試環境: Python 3.6 版本
import socket
import sys
# 直連模式下,機器人默認 IP 地址為 192.168.2.1, 控制命令端口號為 40923
host = "192.168.2.1"
port = 40923
def main():
address = (host, int(port))
# 與機器人控制命令端口建立 TCP 連接
s = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
print("Connecting...")
s.connect(address)
print("Connected!")
while True:
# 等待用戶輸入控制指令
msg = input(">>> please input SDK cmd: ")
# 當用戶輸入 Q 或 q 時,退出當前程序
if msg.upper() == 'Q':
break
# 添加結束符
msg += ';'
# 發送控制命令給機器人
s.send(msg.encode('utf-8'))
try:
# 等待機器人返回執行結果
buf = s.recv(1024)
print(buf.decode('utf-8'))
except socket.error as e:
print("Error receiving :", e)
sys.exit(1)
if not len(buf):
break
# 關閉端口連接
s.shutdown(socket.SHUT_WR)
s.close()
if __name__ == '__main__':
main()
|
將上述代碼保存為 rm_sdk.py
運行腳本
運行 rm_sdk.py 文件 (Windows系統在安裝完成Python環境後可直接雙擊 *.py 文件運行,若無法運行,請按鍵
win+r並輸入cmd,按回車後打開命令運行, 鍵入python rm_sdk.py運行;Linux系統請按鍵ctrl+alt+t打開命令行鍵入python rm_sdk.py)建立 TCP/IP 控制連接
當運行窗口輸出
Connecting...時,代表正在嘗試與機器人建立連接,當運行窗口輸出Connected!;時,表示已經成功建立控制連接。
1.3. 使能 SDK 模式¶
要進行 SDK 控制,我們需要控制機器人進入 SDK 模式。 在上述 Python 運行窗口輸入 command 命令,按回車鍵,程序將會發送該命令至機器人,返回 ok 即機器人成功進入 SDK 模式:
>>> please input SDK cmd: command
ok
成功進入 SDK 模式後,我們就可以輸入控制命令來控制機器人了。
1.4. 發送控制命令¶
繼續輸入 blaster fire ,返回 ok ,同時,發射器會發射一次:
>>> please input SDK cmd: blaster fire
ok
此時,您可以輸入其他控制指令來進行機器人控制,更多控制指令請參考 明文協議。
1.5. 退出 SDK 模式¶
在完成所有控制指令之後,我們需要退出 SDK 模式,這樣機器人的其他功能才可以正常使用。
輸入 quit, 退出 SDK 模式,退出 SDK 模式後無法繼續使用 SDK 功能,若要使用,請重新輸入 command 進入 SDK 模式:
>>> please input SDK cmd: quit
ok
1.6. 小結¶
上面我們通過與機器人建立物理連接,與機器人建立 TCP/IP 控制連接,控制機器人進入 SDK 模式,發送控制指令,退出 SDK 模式等幾個步驟,實現了通過 SDK 對機器人進行相關的控制功能。您可以通過增加其中 發送控制指令 部分的內容,來實現更為複雜的邏輯,完成更為有趣的功能。
其中 Python 編程控制部分,如果您更熟悉其他語言的使用,也可以使用其他語言完成整個控制流程。
如果您手邊的設備不支持 Wi-Fi ,無法使用 Wi-Fi 直接連接,可以參考 連接 使用其他連接模式。
以上就是 SDK 快速入門內容,更多使用細節請參見 SDK文檔,更多示例代碼請參見 RoboMaster Sample Code。