2. 舵機¶
2.1. 介紹¶
舵機的油門控制方式除了支持 485 控制,還可以進行 PWM 控制,控制模式包含:速度模式和角度模式。
備註
舵機的控制模式
舵機的控制模式需要通過官方的編程接口( Scratch / Python )進行切換,並且會記錄在舵機內部,不會隨著舵機掉電而重置。使用 PWM 控制前請確認舵機當前的控制模式。
2.3. 控制說明¶
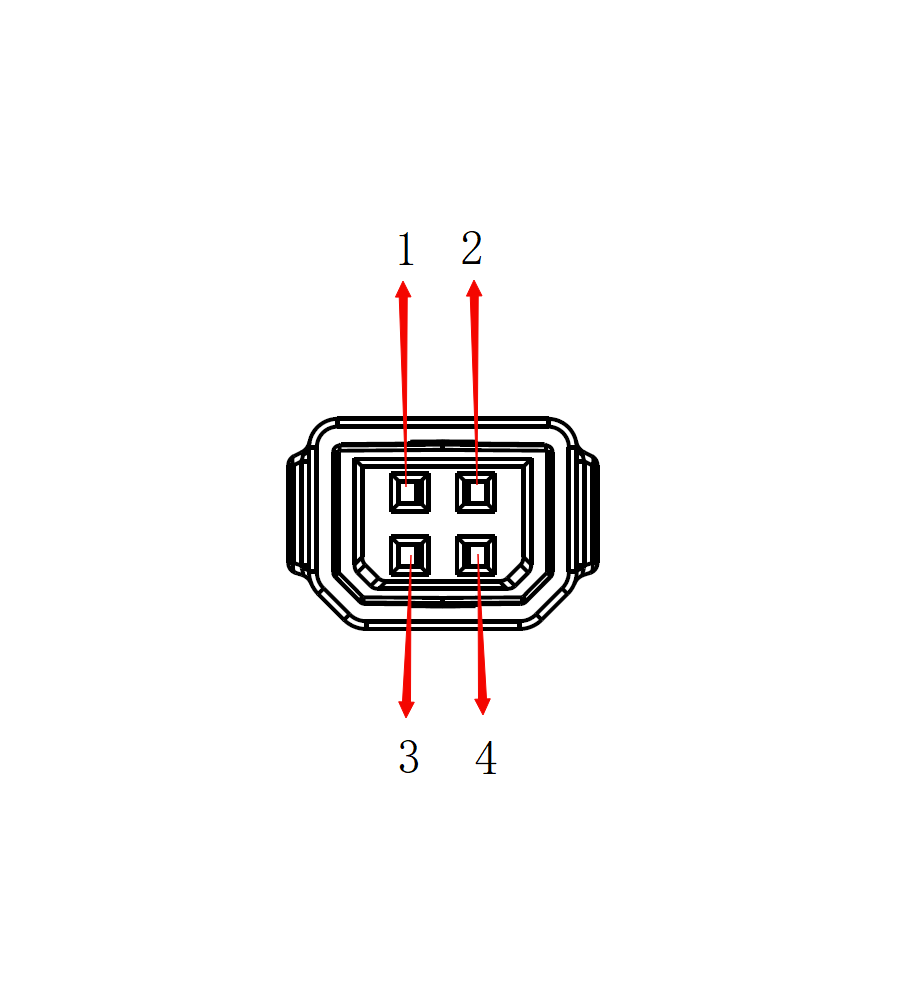
在 PWM 控制方式下,舵機對應的輸入輸出
| 控制模式 | 脈衝週期 | 油門範圍 | 舵機輸出 |
|---|---|---|---|
| 角度模式 | 50Hz | 2.5%~12.5% | 0°~360° |
| 速度模式 | 50hz | 2.5%~7.5% | 49rpm~0rpm,順時針 |
| 7.5%~12.5% | 0rpm~—49rpm,逆時針 |