3. 第三方平台通信¶
3.1. 介紹¶
用戶使用第三方平台跟 RoboMaster EP 建立連接後,通過明文 SDK 和 EP 機器人進行通信,可以控制各個內置模塊和拓展模塊,並獲取 EP 機器人的視頻流、音頻流,極大地豐富了 EP 的擴展性,解鎖更多玩法。
3.2. 第三方平台類型¶
用戶使用的第三方平台為有自主計算能力,具有 WIFI 、 USB 和 UART 接口的計算平台,包括但不限於 DJI 妙算、Arduino 開發板、Micro:bit、樹莓派、Jetson Nano 和 PC。

3.3. 通信方式¶
第三方平台和 RoboMaster EP 的通信方式包括三種: WIFI、 USB 和 UART。下面介紹這三種通信方式的連接方法。
3.3.1. WIFI 連接¶
WIFI 連接包括直連模式和路由器模式,具體參考如下說明。
3.3.1.1. 直連模式¶
條件: 第三方平台具有 WIFI 連接功能。
用途: 第三方平台使用 WIFI 連接到 EP 後,通過明文 SDK 和 EP 進行通信。
步驟:
- 啟動 EP,切換智能中控的連接模式開關至 直連模式。
- 打開第三方平台的無線網絡,掃瞄 EP 的熱點,進行連接。
- 通過明文 SDK 和 EP 進行通信。(詳細步驟參考 WIFI 直連模式)
應用舉例: DJI 妙算、Jetson Nano 或 PC 使用 WIFI 連接到 EP 後,通過明文 SDK 和 EP 進行通信,並獲取 EP 的視頻流、音頻流。
示意圖: 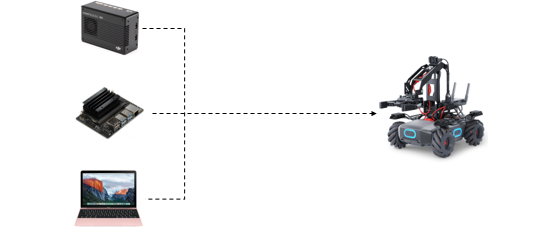
DJI 妙算、Jetson Nano 或 PC 通過 WIFI 直連模式連接到 EP
3.3.1.2. 路由器模式¶
條件: 第三方平台具有 WIFI 或有線網絡連接功能。
用途: 第三方平台和 EP 連接到同一個局域網中,通過明文 SDK 和 EP 進行通信。
步驟:
- 啟動 EP,切換智能中控的連接模式開關 路由器模式。
- 通過官方 App 的掃碼連接方式將 EP 連接到路由器。
- 第三方平台通過 WIFI 或有線網絡連接到同一路由器。
- 通過官方 App 的設置頁面或是編寫腳本等方式獲取到 EP 的 IP 地址。
- 通過明文 SDK 和 EP 進行通信。(詳細步驟參考 WIFI 路由器模式)
應用舉例: DJI 妙算、Jetson Nano 或 PC 和 EP 連接到同一個局域網後,通過明文 SDK 和 EP 進行通信,並獲取 EP 的視頻流、音頻流。
示意圖: 
DJI 妙算、Jetson Nano 或 PC 通過 WIFI 路由器模式連接到 EP
3.3.2. USB 連接¶
條件: 第三方平台具有 TypeA USB 接口,並支持 RNDIS 功能。
用途: 第三方平台通過 USB 線連接到 EP 的智能中控的 Micro USB 端口,使用明文 SDK 和 EP 進行通信。
步驟:
- 啟動 EP,無需關心智能中控的連接模式開關位置。
- 第三方平台通過 USB 線連接到 EP 的智能中控。
- 通過明文 SDK 和 EP 進行通信。(詳細步驟參考 USB 連接)
應用舉例: 樹莓派或 Jetson Nano 固定在 EP 小車上,並由 EP 的電源轉接模塊供電,通過 USB 連接到 EP,使用明文 SDK 和 EP 進行通信,並獲取 EP 的視頻流、音頻流。
示意圖: 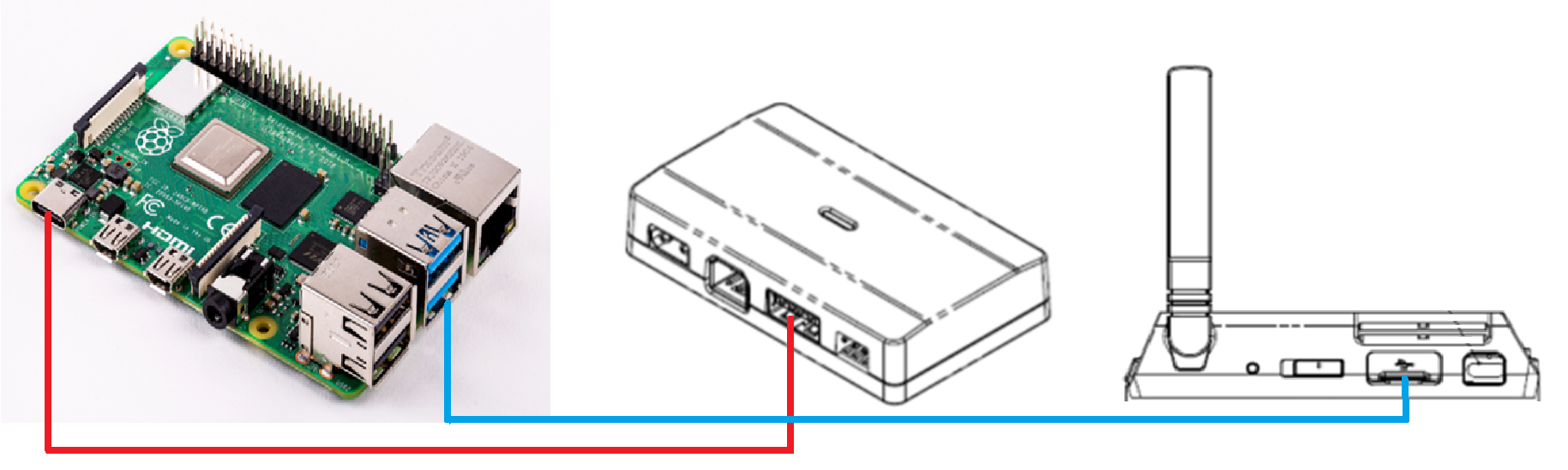
樹莓派連接示意圖
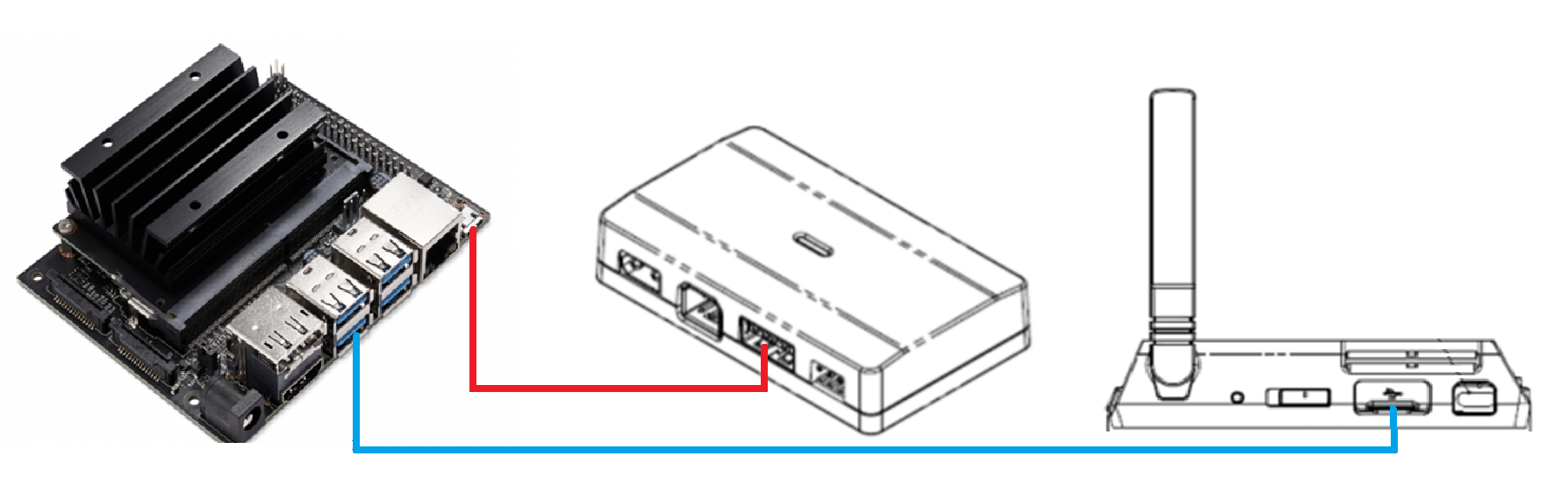
Jetson Nano連接示意圖
3.3.3. UART 連接¶
條件: 第三方平台具有 UART 接口或有串口轉 USB 功能。
用途: 第三方平台通過 UART 連接到 EP 運動控制器的 UART 接口,使用明文 SDK 和 EP 進行通信。
步驟: 應用舉例: Arduino 或 Micro:bit 固定在 EP 小車上,並由 EP 的電源轉接模塊供電,通過 UART 連接到 EP 運動控制器,使用明文 SDK 和 EP 進行通信。
示意圖: 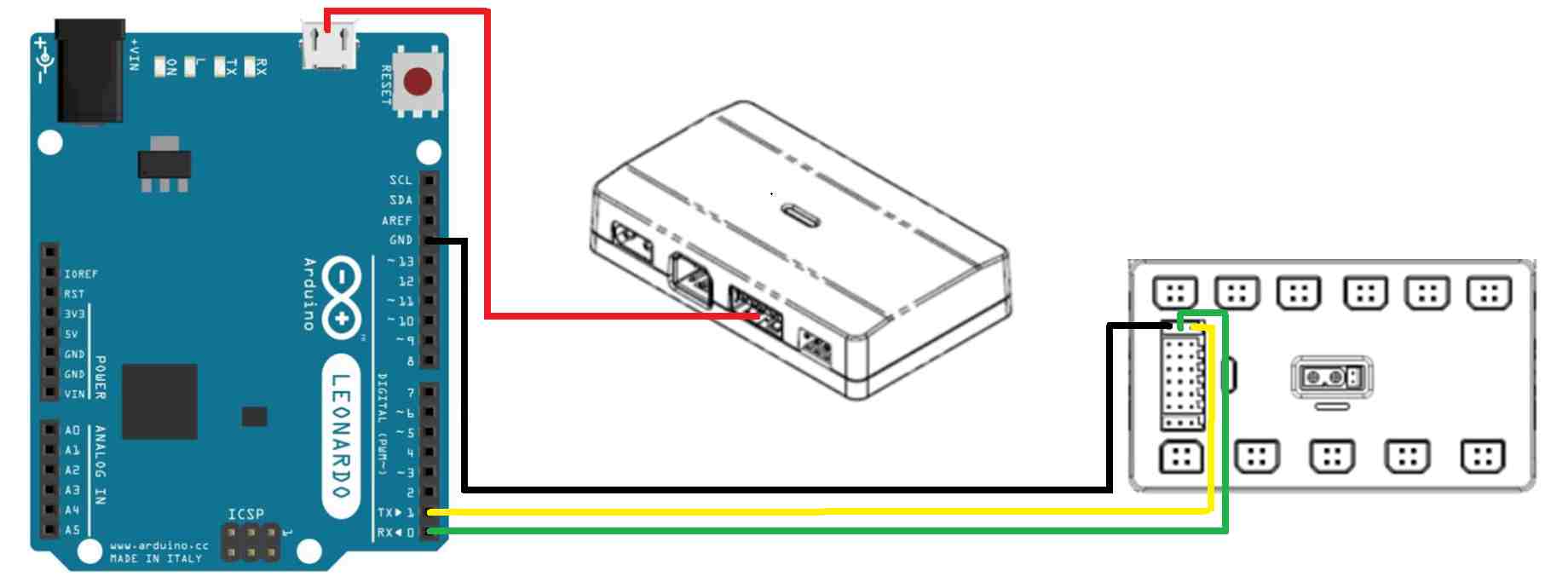
Arduino連接示意圖
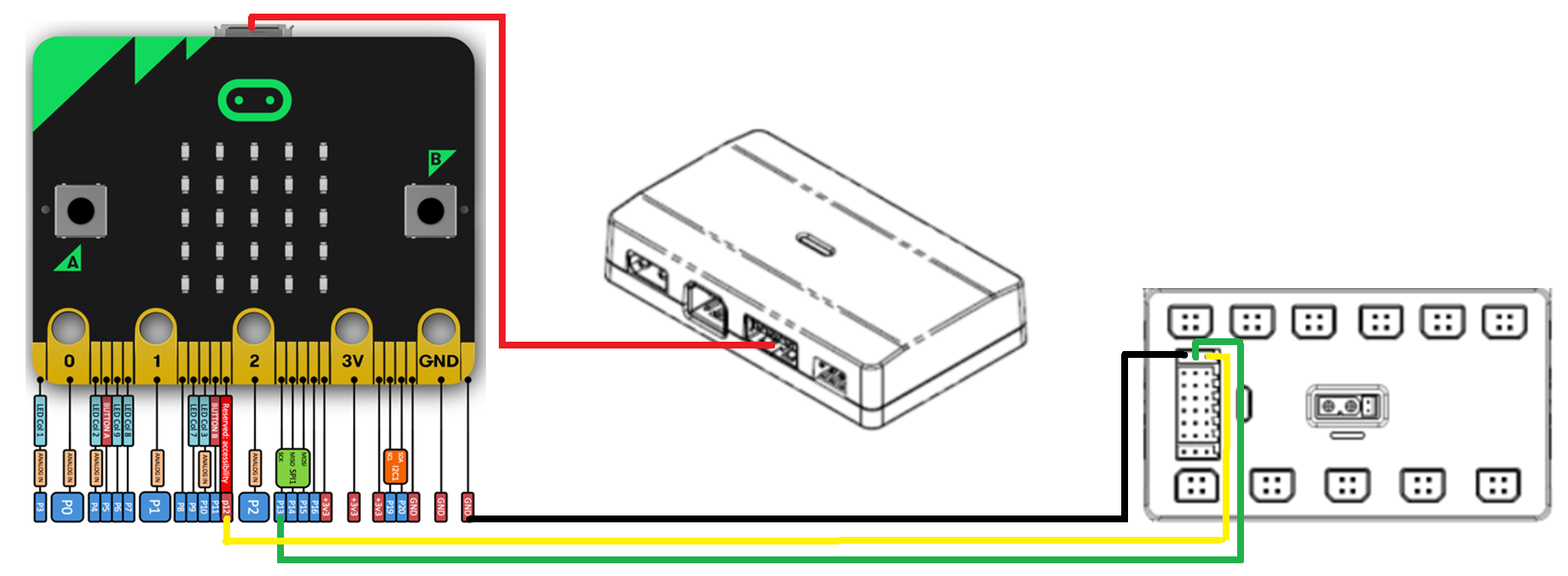
Micro:bit連接示意圖